#include <math.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include "context.h"#include "dlist.h"#include "macros.h"#include "matrix.h"#include "mmath.h"#include "types.h"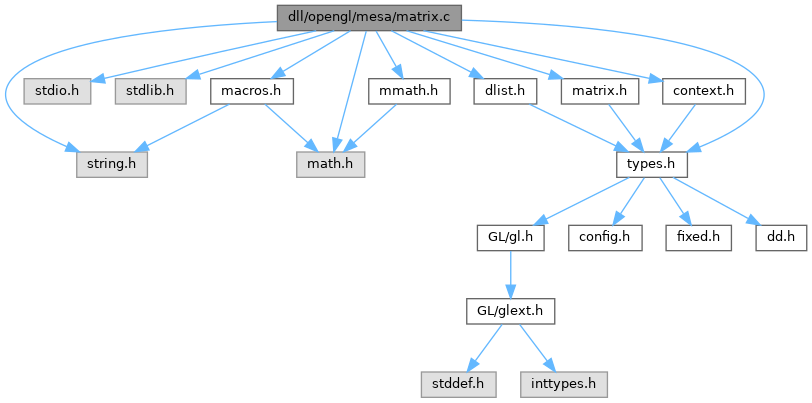
Go to the source code of this file.
Macros | |
| #define | A(row, col) a[(col<<2)+row] |
| #define | B(row, col) b[(col<<2)+row] |
| #define | P(row, col) product[(col<<2)+row] |
| #define | MAT(m, r, c) (m)[(c)*4+(r)] |
| #define | m11 MAT(m,0,0) |
| #define | m12 MAT(m,0,1) |
| #define | m13 MAT(m,0,2) |
| #define | m14 MAT(m,0,3) |
| #define | m21 MAT(m,1,0) |
| #define | m22 MAT(m,1,1) |
| #define | m23 MAT(m,1,2) |
| #define | m24 MAT(m,1,3) |
| #define | m31 MAT(m,2,0) |
| #define | m32 MAT(m,2,1) |
| #define | m33 MAT(m,2,2) |
| #define | m34 MAT(m,2,3) |
| #define | m41 MAT(m,3,0) |
| #define | m42 MAT(m,3,1) |
| #define | m43 MAT(m,3,2) |
| #define | m44 MAT(m,3,3) |
| #define | M(row, col) m[col*4+row] |
| #define | M(row, col) m[col*4+row] |
| #define | M(row, col) m[col*4+row] |
| #define | M(row, col) m[col*4+row] |
Typedefs | |
| typedef GLfloat | Mat2[2][2] |
Enumerations | |
| enum | { M00 = 0 , M01 = 4 , M02 = 8 , M03 = 12 , M10 = 1 , M11 = 5 , M12 = 9 , M13 = 13 , M20 = 2 , M21 = 6 , M22 = 10 , M23 = 14 , M30 = 3 , M31 = 7 , M32 = 11 , M33 = 15 } |
Variables | |
| static GLfloat | Identity [16] |
Macro Definition Documentation
◆ A
◆ B
◆ M [1/4]
◆ M [2/4]
◆ M [3/4]
◆ M [4/4]
◆ m11
◆ m12
◆ m13
◆ m14
◆ m21
◆ m22
◆ m23
◆ m24
◆ m31
◆ m32
◆ m33
◆ m34
◆ m41
◆ m42
◆ m43
◆ m44
◆ MAT
◆ P
Typedef Documentation
◆ Mat2
Enumeration Type Documentation
◆ anonymous enum
| anonymous enum |
Function Documentation
◆ gl_analyze_modelview_matrix()
Definition at line 420 of file matrix.c.
Referenced by gl_Begin(), gl_ClipPlane(), gl_Lightfv(), gl_RasterPos4f(), gl_TexGenfv(), and gl_windowpos().
◆ gl_analyze_projection_matrix()
Definition at line 455 of file matrix.c.
Referenced by gl_Begin(), and gl_RasterPos4f().
◆ gl_analyze_texture_matrix()
Definition at line 487 of file matrix.c.
Referenced by gl_RasterPos4f(), and gl_transform_vb_part2().
◆ gl_Frustum()
| void gl_Frustum | ( | GLcontext * | ctx, |
| GLdouble | left, | ||
| GLdouble | right, | ||
| GLdouble | bottom, | ||
| GLdouble | top, | ||
| GLdouble | nearval, | ||
| GLdouble | farval | ||
| ) |
Definition at line 511 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_LoadIdentity()
Definition at line 709 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_LoadMatrixf()
Definition at line 738 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_MatrixMode()
Definition at line 584 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_MultMatrixf()
Definition at line 785 of file matrix.c.
Referenced by execute_list(), gl_Frustum(), gl_Ortho(), gl_Rotatef(), and init_exec_pointers().
◆ gl_Ortho()
| void gl_Ortho | ( | GLcontext * | ctx, |
| GLdouble | left, | ||
| GLdouble | right, | ||
| GLdouble | bottom, | ||
| GLdouble | top, | ||
| GLdouble | nearval, | ||
| GLdouble | farval | ||
| ) |
Definition at line 553 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_PopMatrix()
Definition at line 653 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_PushMatrix()
Definition at line 603 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_Rotatef()
Definition at line 927 of file matrix.c.
Referenced by init_exec_pointers().
◆ gl_rotation_matrix()
Definition at line 814 of file matrix.c.
Referenced by gl_Rotatef(), and gl_save_Rotatef().
◆ gl_Scalef()
Definition at line 940 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_Translatef()
Definition at line 976 of file matrix.c.
Referenced by execute_list(), and init_exec_pointers().
◆ gl_Viewport()
Definition at line 1014 of file matrix.c.
Referenced by execute_list(), init_exec_pointers(), and sw_SetContext().
◆ invert_matrix()
Definition at line 290 of file matrix.c.
Referenced by gl_analyze_modelview_matrix().
◆ invert_matrix_general()
Definition at line 199 of file matrix.c.
Referenced by invert_matrix().
◆ is_identity()
Definition at line 402 of file matrix.c.
Referenced by brush_fill_pixels(), gl_analyze_modelview_matrix(), gl_analyze_projection_matrix(), and gl_analyze_texture_matrix().
◆ matmul()
Definition at line 154 of file matrix.c.
Referenced by gl_MultMatrixf().
Variable Documentation
◆ Identity
|
static |
Definition at line 127 of file matrix.c.
Referenced by gl_LoadIdentity(), gl_rotation_matrix(), and invert_matrix().