#include <stdlib.h>#include <stdio.h>#include "zlassert.h"#include "partitionY.h"#include "searchTree.h"#include "quicksort.h"#include "polyUtil.h"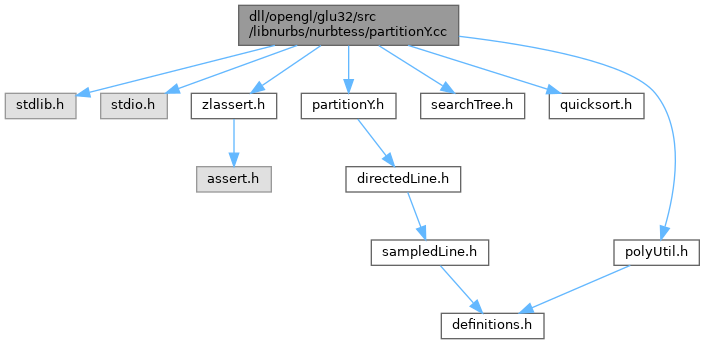
Go to the source code of this file.
Macros | |
| #define | max(a, b) ((a>b)? a:b) |
| #define | min(a, b) ((a>b)? b:a) |
Macro Definition Documentation
◆ max
◆ min
Function Documentation
◆ compEdges()
|
static |
Definition at line 246 of file partitionY.cc.
Referenced by findDiagonals(), and sweepY().
◆ compInY()
|
static |
Definition at line 328 of file partitionY.cc.
Referenced by DBGfindDiagonals(), and partitionY().
◆ compVertInY()
◆ cuspType()
| Int cuspType | ( | directedLine * | v | ) |
Definition at line 142 of file partitionY.cc.
Referenced by MC_sweepY().
◆ DBGfindDiagonals()
| directedLine ** DBGfindDiagonals | ( | directedLine * | polygons, |
| Int & | num_diagonals | ||
| ) |
Definition at line 426 of file partitionY.cc.
◆ deleteRepeatDiagonals()
| Int deleteRepeatDiagonals | ( | Int | num_diagonals, |
| directedLine ** | diagonal_vertices, | ||
| directedLine ** | new_vertices | ||
| ) |
Definition at line 386 of file partitionY.cc.
Referenced by DBGfindDiagonals(), MC_partitionY(), and partitionY().
◆ findDiagonals()
| void findDiagonals | ( | Int | total_num_edges, |
| directedLine ** | sortedVertices, | ||
| sweepRange ** | ranges, | ||
| Int & | num_diagonals, | ||
| directedLine ** | diagonal_vertices | ||
| ) |
Definition at line 333 of file partitionY.cc.
Referenced by DBGfindDiagonals(), and partitionY().
◆ intersectHoriz()
Definition at line 230 of file partitionY.cc.
Referenced by compEdges().
◆ isAbove()
| Int isAbove | ( | directedLine * | v, |
| directedLine * | e | ||
| ) |
Definition at line 89 of file partitionY.cc.
Referenced by findDiagonals(), isCusp(), MC_findDiagonals(), MC_sweepY(), and sweepY().
◆ isBelow()
| Int isBelow | ( | directedLine * | v, |
| directedLine * | e | ||
| ) |
Definition at line 73 of file partitionY.cc.
Referenced by findDiagonals(), isCusp(), MC_findDiagonals(), MC_sweepY(), and sweepY().
◆ isCusp()
| Int isCusp | ( | directedLine * | v | ) |
Definition at line 100 of file partitionY.cc.
Referenced by cuspType(), and directedLineLoopToMonoChainLoop().
◆ isReflex()
| Int isReflex | ( | directedLine * | v | ) |
Definition at line 122 of file partitionY.cc.
Referenced by cuspType(), and reflexChain::processNewVertex().
◆ partitionY()
| directedLine * partitionY | ( | directedLine * | polygons, |
| sampledLine ** | retSampledLines | ||
| ) |
Definition at line 447 of file partitionY.cc.
◆ sweepRangeDelete()
| void sweepRangeDelete | ( | sweepRange * | range | ) |
Definition at line 162 of file partitionY.cc.
◆ sweepRangeEqual()
| Int sweepRangeEqual | ( | sweepRange * | src1, |
| sweepRange * | src2 | ||
| ) |
Definition at line 167 of file partitionY.cc.
Referenced by findDiagonals(), and MC_findDiagonals().
◆ sweepRangeMake()
| sweepRange * sweepRangeMake | ( | directedLine * | left, |
| Int | leftType, | ||
| directedLine * | right, | ||
| Int | rightType | ||
| ) |
Definition at line 150 of file partitionY.cc.
Referenced by MC_sweepY(), and sweepY().
◆ sweepY()
| void sweepY | ( | Int | nVertices, |
| directedLine ** | sortedVertices, | ||
| sweepRange ** | ret_ranges | ||
| ) |
Definition at line 722 of file partitionY.cc.
Referenced by DBGfindDiagonals(), and partitionY().