#include "sampleMonoPoly.h"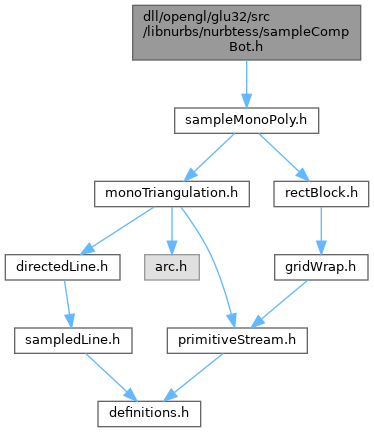
Go to the source code of this file.
Functions | |
| void | findBotLeftSegment (vertexArray *leftChain, Int leftEnd, Int leftCorner, Real u, Int &ret_index_mono, Int &ret_index_pass) |
| void | findBotRightSegment (vertexArray *rightChain, Int rightEnd, Int rightCorner, Real u, Int &ret_index_mono, Int &ret_index_pass) |
| void | sampleBotRightWithGridLinePost (Real *botVertex, vertexArray *rightChain, Int rightEnd, Int segIndexMono, Int segIndexPass, Int rightCorner, gridWrap *grid, Int gridV, Int leftU, Int rightU, primStream *pStream) |
| void | sampleBotRightWithGridLine (Real *botVertex, vertexArray *rightChain, Int rightEnd, Int rightCorner, gridWrap *grid, Int gridV, Int leftU, Int rightU, primStream *pStream) |
| void | sampleBotLeftWithGridLinePost (Real *botVertex, vertexArray *leftChain, Int leftEnd, Int segIndexMono, Int segIndexPass, Int leftCorner, gridWrap *grid, Int gridV, Int leftU, Int rightU, primStream *pStream) |
| void | sampleBotLeftWithGridLine (Real *botVertex, vertexArray *leftChain, Int leftEnd, Int leftCorner, gridWrap *grid, Int gridV, Int leftU, Int rightU, primStream *pStream) |
| Int | findBotSeparator (vertexArray *leftChain, Int leftEnd, Int leftCorner, vertexArray *rightChain, Int rightEnd, Int rightCorner, Int &ret_sep_left, Int &ret_sep_right) |
| void | sampleCompBot (Real *botVertex, vertexArray *leftChain, Int leftEnd, vertexArray *rightChain, Int rightEnd, gridBoundaryChain *leftGridChain, gridBoundaryChain *rightGridChain, Int gridIndex, Int down_leftCornerWhere, Int down_leftCornerIndex, Int down_rightCornerWhere, Int down_rightCornerIndex, primStream *pStream) |
| void | sampleCompBotSimple (Real *botVertex, vertexArray *leftChain, Int leftEnd, vertexArray *rightChain, Int rightEnd, gridBoundaryChain *leftGridChain, gridBoundaryChain *rightGridChain, Int gridIndex, Int down_leftCornerWhere, Int down_leftCornerIndex, Int down_rightCornerWhere, Int down_rightCornerIndex, primStream *pStream) |
Function Documentation
◆ findBotLeftSegment()
| void findBotLeftSegment | ( | vertexArray * | leftChain, |
| Int | leftEnd, | ||
| Int | leftCorner, | ||
| Real | u, | ||
| Int & | ret_index_mono, | ||
| Int & | ret_index_pass | ||
| ) |
Definition at line 52 of file sampleCompBot.cc.
Referenced by sampleBotLeftWithGridLine(), and sampleCompBot().
◆ findBotRightSegment()
| void findBotRightSegment | ( | vertexArray * | rightChain, |
| Int | rightEnd, | ||
| Int | rightCorner, | ||
| Real | u, | ||
| Int & | ret_index_mono, | ||
| Int & | ret_index_pass | ||
| ) |
Definition at line 78 of file sampleCompBot.cc.
Referenced by sampleBotRightWithGridLine(), and sampleCompBot().
◆ findBotSeparator()
| Int findBotSeparator | ( | vertexArray * | leftChain, |
| Int | leftEnd, | ||
| Int | leftCorner, | ||
| vertexArray * | rightChain, | ||
| Int | rightEnd, | ||
| Int | rightCorner, | ||
| Int & | ret_sep_left, | ||
| Int & | ret_sep_right | ||
| ) |
Definition at line 311 of file sampleCompBot.cc.
Referenced by sampleCompBot().
◆ sampleBotLeftWithGridLine()
| void sampleBotLeftWithGridLine | ( | Real * | botVertex, |
| vertexArray * | leftChain, | ||
| Int | leftEnd, | ||
| Int | leftCorner, | ||
| gridWrap * | grid, | ||
| Int | gridV, | ||
| Int | leftU, | ||
| Int | rightU, | ||
| primStream * | pStream | ||
| ) |
Definition at line 279 of file sampleCompBot.cc.
Referenced by sampleCompBot().
◆ sampleBotLeftWithGridLinePost()
| void sampleBotLeftWithGridLinePost | ( | Real * | botVertex, |
| vertexArray * | leftChain, | ||
| Int | leftEnd, | ||
| Int | segIndexMono, | ||
| Int | segIndexPass, | ||
| Int | leftCorner, | ||
| gridWrap * | grid, | ||
| Int | gridV, | ||
| Int | leftU, | ||
| Int | rightU, | ||
| primStream * | pStream | ||
| ) |
Definition at line 232 of file sampleCompBot.cc.
Referenced by sampleBotLeftWithGridLine(), and sampleCompBot().
◆ sampleBotRightWithGridLine()
| void sampleBotRightWithGridLine | ( | Real * | botVertex, |
| vertexArray * | rightChain, | ||
| Int | rightEnd, | ||
| Int | rightCorner, | ||
| gridWrap * | grid, | ||
| Int | gridV, | ||
| Int | leftU, | ||
| Int | rightU, | ||
| primStream * | pStream | ||
| ) |
Definition at line 193 of file sampleCompBot.cc.
Referenced by sampleCompBot().
◆ sampleBotRightWithGridLinePost()
| void sampleBotRightWithGridLinePost | ( | Real * | botVertex, |
| vertexArray * | rightChain, | ||
| Int | rightEnd, | ||
| Int | segIndexMono, | ||
| Int | segIndexPass, | ||
| Int | rightCorner, | ||
| gridWrap * | grid, | ||
| Int | gridV, | ||
| Int | leftU, | ||
| Int | rightU, | ||
| primStream * | pStream | ||
| ) |
Definition at line 107 of file sampleCompBot.cc.
Referenced by sampleBotRightWithGridLine(), and sampleCompBot().
◆ sampleCompBot()
| void sampleCompBot | ( | Real * | botVertex, |
| vertexArray * | leftChain, | ||
| Int | leftEnd, | ||
| vertexArray * | rightChain, | ||
| Int | rightEnd, | ||
| gridBoundaryChain * | leftGridChain, | ||
| gridBoundaryChain * | rightGridChain, | ||
| Int | gridIndex, | ||
| Int | down_leftCornerWhere, | ||
| Int | down_leftCornerIndex, | ||
| Int | down_rightCornerWhere, | ||
| Int | down_rightCornerIndex, | ||
| primStream * | pStream | ||
| ) |
Definition at line 452 of file sampleCompBot.cc.
Referenced by sampleConnectedComp().
◆ sampleCompBotSimple()
| void sampleCompBotSimple | ( | Real * | botVertex, |
| vertexArray * | leftChain, | ||
| Int | leftEnd, | ||
| vertexArray * | rightChain, | ||
| Int | rightEnd, | ||
| gridBoundaryChain * | leftGridChain, | ||
| gridBoundaryChain * | rightGridChain, | ||
| Int | gridIndex, | ||
| Int | down_leftCornerWhere, | ||
| Int | down_leftCornerIndex, | ||
| Int | down_rightCornerWhere, | ||
| Int | down_rightCornerIndex, | ||
| primStream * | pStream | ||
| ) |
Definition at line 729 of file sampleCompBot.cc.
Referenced by sampleCompBot().